根據中國移動機器人(AGV/AMR)產業聯盟數據,新戰略移動機器人產業研究所統計, 2021年度中國市場新增復合移動機器人980臺,同比增長75%,市場銷售額達到4.1億元,同比增長 57.7%。
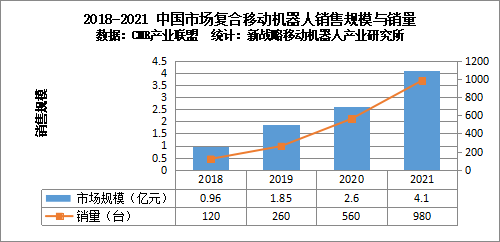



圖表:2018-2021中國市場復合移動機器人銷售規模與數量
從2015年國內第一款復合機器人面世開始,經過近幾年發展,復合機器人在某些領域已經邁入“小批量”應用階段,但離大規模爆發還尚早。綜合產品特性及市場需求來看,在工業物流領域,“手腳兼具”的復合機器人,如何接好“最后一棒”?
從實驗室走向落地
盡管復合機器人落地應用時間并不長,但相關技術研究其實從很早就開始了。
早在1984年,德國MORO開發了這種復合機器人系統,由于受當時人工智能技術的局限,這種機器人只是做一些簡單的搬運。
1994 年 Yamamoto and Yun 用操作度準則確定機械臂的理想構形,但沒有將移動機械臂作為一個整體來考慮,1999年,他們研究了移動機械臂的平臺與機械臂間的協調問題,但是對移動機械手移動性和操作性之間的關系沒有揭示。
在2006年之后,隨著計算機視覺、激光傳感器和機器學習應用技術的成熟,使它增加了很多的活力,各種公司推出了很多復合機器人。比較典型的是庫卡發布Youbot復合機器人-移動機械臂機器人。之后復合機器人集成了很多的技術變得更加聰明,如美國的PR2機器人。
國內首臺商業化復合機器人產品在2015年推出,但一些高校及研究機構對復合機器人的研究在這之前就已經展開。
孵化于西安交大的移動機器人企業優艾智合,其核心創始團隊早在在校期間就開始探索復合機器人技術與應用。
2017年,優艾智合正式成立。同年,優艾智針對米其林輪胎的需要,開發出了以自主導航移動平臺、多關節機械臂、輪胎探傷檢測傳感器為三大核心模塊的商用車輛巡檢機器人,該巡檢機器人分為三層,最底層是移動底盤,中間是機械臂,最上面一層是檢測機構,可通過機器視覺和傳感器智能檢查并上報有問題的車輛,這是優艾智合復合機器人商業化落地的開端。
這一時期,國內對復合機器人的關注也開始逐漸增多,很多移動機器人公司都開辟了相關產品線,相繼推出復合類產品。
而在第一款復合機器人正式落地后,基于移動底盤技術的積累,優艾智合開始不斷豐富產品線,包括系列標準底盤以及在此基礎上根據不同場景需求打造的不同類型的移動機器人。
當前,優艾智合業務主要分為兩大板塊:工業物流&巡檢運維。
在工業物流領域,優艾智合致力于為以半導體為核心的精密電子制造客戶提供軟硬一體的物流自動化解決方案。
優艾智合認為,復合機器人在移動底盤移動性能的基礎上,附加了機械臂行業經過多年發展積累的價值,這是打通全流程物流流轉的關鍵,“機械臂通過簡單的更換夾爪就可以實現復雜操作,它能夠對接的對象不僅是非常標準化的機臺設備、輥筒設備或者是一個標準料車,還有非常精細化的料盒,這是一般的移動搬運設備所不具備的。”
單機協同&多機調度——規模化應用的兩大關鍵
技術的不斷發展是產品落地的前提。
優艾智合CTO邊旭認為,復合機器人從實驗室走向落地的關鍵在兩方面,一是自然導航技術(以激光SLAM路線為主)的成熟,二是協作型機械臂的發展。
“基于自然導航技術,柔性大規模調度可以實現,而協作機械臂的誕生,使得人機協作的安全性可以保證,這兩大技術的成熟是當前復合機器人得以落地應用的關鍵。”
近幾年,在不同行業中,復合機器人的落地正在逐漸加快。但邊旭提到:“其實從15年首臺商業化產品落地到現在,復合機器人整體技術框架并沒有太大的變化,仍然是側重于做集成應用。”
復合機器人本體主要由三大部分組成:移動底盤、機械臂、末端執行器。復合機器人廠商做的,就是將三者集成一起,使其協同應用。
從單機角度而言,在集成應用的過程中,如何使三者更好的協同運作,是業內主要的探索方向,而其中涉及到的主要是復合機器人的控制問題。
當前,復合機器人主要有以下控制方式以下:
移動與操作協同控制。整車控制層面,復合機器人是由AMR和機械臂配合完成,需要機內調度系統打通兩者的協議層,同時將機械臂的示教系統和AMR部署系統進行UI層面的打通。在產品應用層面,部署調試和任務層面AMR和機械臂要實現解耦,以實現更高效的開發和更快速的部署。此控制方式將復合機器人作為一個多自由體進行控制,由同一個控制器控制底盤驅動電機和關節電機,構建統一的運動學和動力學模型進行解算,此方式可以實現底盤和操作的聯動,具備最大的柔性和較高的技術難度。
移動與操作獨立控制與調度。此控制方式通常由一個調度系統同時控制底盤和上層機械臂兩個設備,底盤與機械臂的任務和狀態相對獨立,僅通過有限的IO通訊或者協議通訊交互狀態。一般此種控制方式在執行作業時也需要上下互鎖。
為了更好提升復合機器人的協同性,優艾智合自主研發了復合機器人操作系統,基于一款控制系統可以實現以上兩種控制方式,并可以兼容目前主流的協作型機器人和工業機器人。
單機協同之外,多機協同也是復合機器人深入場景及規模化應用的先決條件之一。
假如把工廠看作一個有機生命體,規模化落地的復合機器人就是生命體里攜帶氧氣的紅細胞,要怎樣調度才能使細胞群體擁有一致性,達到最優的工作效率?
優艾智合工業物流事業部總監許瑨提到,“在大部分工業場景中,往往都不是一臺機器人在工作,而是一群,集群化管理可以大大增加效能,達到1+1大于2的效果,這需要機器人廠商將上層調度系統做得非常完備,這是復合機器人能夠大規模應用的核心,復合機器人廠商要做的,并不是只將單機做出來,還需要能夠在實際的應用場景里,將多臺機器人協同調度起來,實現效率最優化。”
軟件算法能力外,要做好復合機器人的調度,許瑨認為,還需要深入了解客戶的整廠物流規劃,“只有熟悉生產制造流程和物流流轉模式,才能對機器人做出合適的調度。”
基于對行業的理解以及技術的沉淀,優艾智合自主研發了 YOUI Fleet 多機調度協作系統以及YOUI TMS 場內機器人物流系統。
“YOUI Fleet 自發布以來一直在經歷仿真測試。從一開始基礎的去場景仿真壓力測試調度算法,到現在的1:1項目仿真,一直在經歷不斷升級的壓力測試挑戰。目前在算法邏輯層面已經突破調度500臺機器人的壓力測試,實際項目仿真中已經實現200臺機器人的調度還原。”
邊旭透露,目前優艾智合應用數量最多的單個項目一共投入了150臺復合機器人,公司的規模化調度能力已經在實際項目落地中得到了驗證。
提及優艾智合接下來的技術方向,邊旭表示,“現階段還是會從軟件層面著手,將機械臂與移動機器人的視覺系統融合,生成MOS系統,另外優化安全系統的任務邏輯,加速現場部署,最關鍵的是要為復合機器人的一致性做工具端與算法端的深入研究。”
從半導體到精密電子制造全場景
伴隨著復合移動機器人技術走向成熟,相應的市場需求也迎來增長,這一趨勢在半導體領域尤為凸顯。
許瑨介紹,半導體行業之所以會迎來復合移動機器人的爆發,因為其本身就兼具了很多先決條件。首先,搬運的對象是精密、昂貴、輕型的材料;其次,工作流程有大量重復搬運及上下料的動作。另外,半導體工廠的制造生產流程普遍是自動化、信息化的。
“最重要的一點,目前半導體行業迫切地需要機器人來彌補勞動力缺口。”許瑨強調。
在人口紅利減弱、勞動力從第二產業向第三產業轉移的大背景下,行業持續面臨“用工荒”問題,招聘難、培養慢、離職率高成為行業的普遍痛點;工廠環境復雜,三班倒工作制,員工流動性高。“此外,半導體行業都是無塵車間,人員在里面工作需要全副武裝防護服,加之空間狹窄,久而久之容易催生不穩定的情緒因素,然而在物料轉運的過程中需要非常精細,人的放置力度稍微出現差錯都會使物料震裂,良率下降,這些都是潛在隱患。”
在優艾智合看來,半導體行業對物流自動化有著迫切需求。針對半導體行業不同環節的應用特點,優艾智合開發了系列移動機器人產品,可為半導體上下游企業提供整體的物流解決方案,而這其中,復合機器人是非常重要的一環。
許瑨認為,“復合機器人有手有腳有眼睛,就像人一樣,但它比人更穩定。”
2019年中旬,針對芯片封測車間多物料轉運問題,優艾智合開始研發移動操作機器人,在移動底盤上搭載了承料貨架,實現了半導體封測前端FOL工藝環節彈夾、焊針、焊線等物料在工序間的自主轉運。
針對半導體行業晶圓搬運這一環節,優艾智合自2019年中旬開始啟動晶圓搬運機器人的研發工作,2021年3月,在全球領先的半導體8寸晶圓廠,利用晶圓盒搬運機器人執行晶圓盒轉運任務,該機器人搭載了6自由度機械臂及智能夾爪,實現晶圓盒在電子料架、機臺、存儲倉之間的柔性運輸及無人化自動上下料。
從2019年正式切入半導體領域至今,優艾智合針對這一場景已經相繼開發了多個系列機器人,已布局半導體產業鏈的多個環節,從上游的晶圓制造、芯片封測,以及各種光電器件、傳感器、分立器件的制造,再到下游的SMT、模組加工,以及最后的組裝環節。包括海內外的多家國際知名半導體廠已成功引入了優艾智合解決方案以提升自動化。
許瑨表示,國內的復合移動機器人雖起步較晚,但中國作為全球最大消費電子產品市場,隨著半導體相關產業規模迅速擴張,制造企業擴廠增產的需求進一步增加,倒逼工廠通過物流自動化等手段實現降本增效的目標,而復合移動機器人在此過程中發揮著重要價值,可以預見在市場應用驅動下復合機器人的爆發式增長。
同時,在許瑨看來,半導體行業只是一個開始,在工業制造領域,復合機器人還有很大的機會。“目前移動搬運類型的技術已經非常成熟,能夠解決工廠大范圍、長距離、復雜批次的移載工作,但是邊界只能觸達產線的線邊倉,還是需要人力執行“最后一米”的物料裝填,但現在復合機器人可以很好解決這個問題。”
許瑨預測:“未來會有50%以上的智能工廠用復合機器人來完成最后一米的物流搬運。”
而對于優艾智合而言,目前最重要的是要推動復合機器人規模化落地。
2021年,優艾智合移動機器人出貨近千臺,其中復合機器人占比超過三分之一。2022年,優艾智合會以半導體為核心,持續聚焦精密電子板塊,深入理解各個場景,串聯整個精密電子制造的上下游規模化服務,在未來更好地將復合型產品橫向復制到不同行業。
規范標準:助力行業發展
作為復合機器人賽道的領先者,優艾智合在聚焦企業自身發展的同時,也在思考未來復合機器人行業整體的發展方向。
優艾智合認為,標準化是一個行業發展壯大的前提之一。
2022年4月,由中國移動機器人(AGV/AMR)產業聯盟組織,優艾智合牽頭制定《工業應用移動機器人 技術規范-復合機器人》將正式對外發布。
邊旭表示,制定標準的意義主要在于三個大方面。
第一,行業發展方面:在招標與商業項目實行的過程中,有規范性的參考標準可以提供給合作企業,同時可以幫助初創型小企業快速地融入行業。
第二,技術突破方面:移動機器人與機械臂各自獨立的主控制系統已經相對成熟,雙方的硬件及軟件需要更優化整合,規范的行業標準可以推動雙方控制與調控系統朝一致性方向發展。
第三,響應國家政策:機器人十四五規劃特別強調了“可在運轉、打磨、裝配等工作區域內任意位置移動、實現空間任意位置和姿態可達、具有靈活抓取和操作能力的移動操作機器人。”行業積極響應國家政策,通過制定規范標準形成復合機器人領域影響力。
邊旭還提到,目前復合機器人的應用開發生態是相對封閉的,未來,通過標準化、模塊化的方式,可以降低開發門檻,進而推動復合機器人在更多場景的規模化落地。
結語:復合機器人的出現給工業智能制造提供了新的破局之路,盡管當前來看,還存在技術門檻高等問題等,但新技術的誕生與應用并不是一蹴而就的,在市場應用和技術發展雙重驅動下,復合移動機器人將在更多的場景中實現規模化應用。