多地形通過性和多場景的適應性一直是無人駕駛、機器人等場景化所需要突破的難題。通過多模態運動融合,提高跨維度運動的柔性適應能力是一種理想的解決方式,這決定了機器人和移動平臺未來應用場景開拓的深度和廣度。
為探索多場景交互學習的可行方案,領先的移動機器人底盤和軟硬件系統提供商松靈機器人,借助多年的機器人硬件結構創新經驗和軟件算法開發優勢,為科研教育用戶開創了全球首款集四種運動模態和高性能傳感器系統于一體的ROS開發平臺LIMO,提供了適應場景更廣泛、更符合行業應用要求的學習平臺,適用于機器人和無人駕駛的教育、功能研發、產品開發。可以說,LIMO同時滿足了機器人和無人駕駛科研教育場景中對于不同環境下的作業、運動學模態、導航與定位與路徑規劃算法等研究的復雜性需求。

同時,為了提高產品的內容豐富度,助力個人愛好者、極客、院校科研教學、企業培訓,幫助開發者更快捷學習機器人AGV、自動駕駛、人工智能等行業相關知識,松靈機器人聯合國內ROS社區教學開創者古月居,并結合學校教學體系、企業用人和行業應用需求、極客探索目標,共同打造基于LIMO開發平臺的零基礎ROS免費入門教程和院校教學級精品課程,創建良好的開發者生態。
今天,松靈機器人多模態®ROS機器人開發平臺LIMO正式發布,我們將提供標準版和高配版兩個版本,用戶可根據實際應用需求選配。
輪轂驅動一體化,一車四種運動模態
LIMO是全球首款集四種運動模態于一體的ROS開發平臺,用戶不再需要買四臺ROS小車即可實現四輪差速型、四輪阿克曼型、履帶型、麥克納姆輪型四種運動模態。專利性創新輪轂結構設計使得單個車輪實現獨立驅動,四種模態之間的切換可以簡易快速實現,用戶只需要3分鐘通過更換標配的3種輪胎皮就能完成,其中,阿克曼和四輪差速形態只需通過改變2個插銷鎖閉狀態,直接一鍵切換運動模式。

一車三種胎皮,四種運動模態,簡易切換
在整車設計上,松靈LIMO整體車架采用的是高剛性的金屬結構,區別于桌面型ROS開發小車,具有更高的運動穩定性、可靠性。此外,LIMO使用的是和汽車類似結構的輪轂電機,開發了專利性驅動一體化電機,精簡了大量傳動部件,讓車輛結構更趨于緊湊的同時也提升了車體空間利用率,便于實現多種復雜的驅動方式,這也使得LIMO動能更強勁、可控性更優、安全性更好。這種設計讓LIMO也能夠適應戶外多道路環境,諸如高摩擦性路面,草地,小砂石,斜坡等場景,能夠爬坡25度。
此外,配合一個30KG大扭力轉向舵機,這意味著LIMO具有更高的轉彎靈活度、操作穩定性和行駛平順性,能讓轉向移動更加快捷,增強車體通過性能,幫助更好實現部分特殊環境的二次開發,提升工作效率。
LIMO轉向韌性靈活
配備超高性能傳感器,平臺空間擴展性強
采用電機驅動一體化輪轂電機的配置也大大增加了車體平臺搭載空間,LIMO集成了包括激光雷達、深度相機、輪速計、觸屏顯示屏等超高性能傳感器。為便于用戶根據實際應用需求選配,LIMO提供了標準版和高配版兩個版本,主要區別在于控制模塊和深度相機配置。標準版采用的樹莓派Raspberry Pi,而高配版則搭載的是具有4核CPU和4G內存的NvidiaJetson nano開發板,同時高配版還搭載了英特爾深度相機D435, 可實現深度視覺V-SLAM功能,并能實現黑暗環境下的環境感知,有利于開發者學習地下管道等狹小黑暗空間的安全巡檢應用開發等。

LIMO提供標準版和高配版兩個版本
此外,LIMO預留了多安裝孔位,多個USB接口,用戶可根據開發需求,拓展更多配置實現諸如安防、巡檢、搬運等應用。其次,LIMO接入了訊飛語音模塊,能為服務機器人開發提供交互式方案。這個語音模塊自帶聲卡、麥克風、喇叭,能自動識別字母數字等,還能讓開發者基于此開發更加有趣的應用,例如語音導航,語音路徑規劃等。
古月居精品課程,配套實擬沙盤
作為機器人多模態®ROS開發平臺,在開發軟件上,延續了松靈機器人一貫開源的特色,LIMO的軟件全開源,并支持ROS1 和ROS2開發,用戶可以通過功能強大的Gazebo模型仿真包,自行搭建部署仿真環境,配置相應運行路徑,實現建圖、導航、避障、路線規劃等。
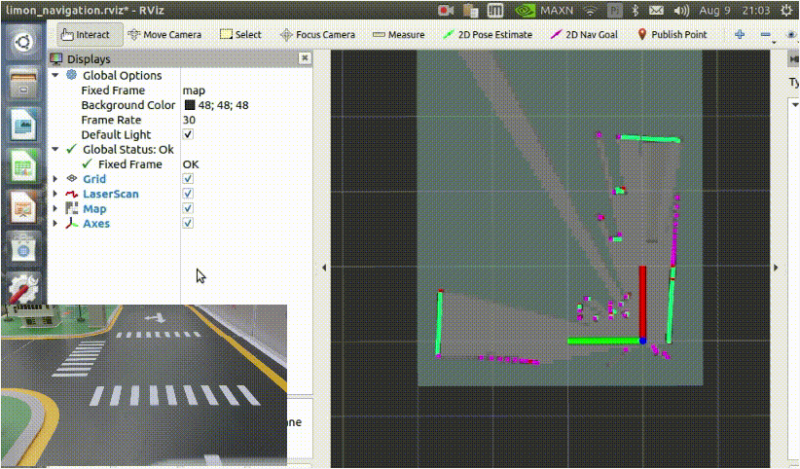
LIMO在配套沙盤場景實現SLAM實時建圖
然而,Gazebo對于一些剛入門的新手,在不穩定的空間中依然容易一片“爆紅”,為此,松靈機器人進行了兩個流程優化。
首先,松靈機器人為LIMO提供了可選配的配套場景實擬沙盤,用戶只需組裝十分鐘,即可建立多場景實擬學習、教學、模擬考試場地,極大節省了場地設計和搭建的時間,這也意味著對入門選手和學校教學極其友好,不僅能快速在沙盤內一站式完成定位、建圖、感知和路線規劃等核心功能學習,還能實現多種功能開發,例如識別字符板,識別紅綠燈,倒車入庫,定位導航,規定路線巡檢,障礙識別避障等功能模塊。
LIMO在配套沙盤內可以實現倒車入庫
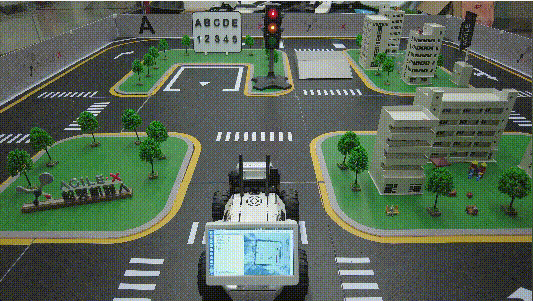
LIMO在配套沙盤內可以實現紅綠燈識別

LIMO在配套沙盤內可以25度上坡
其次,松靈機器人聯合國內ROS社區教學開創者古月居,打造了適應四種運動模態多場景的院校教學級精品系統課程,不僅包含了ROS開發系統教程,還有相關的機器人硬件結構、傳感器系統等內容,真正地為科研教育用戶提供更符合行業應用和就業技能要求的深度學習平臺。
關于松靈機器人
松靈機器人成立于2016年, 是全球領先的機器人底盤制造商和移動機器人系統解決方案服務商, 為客戶提供一站式可定制化的移動機器人解決方案。公司自主開發和生產的多模態輪式和履帶式移動底盤已全矩陣覆蓋行業場景,包括低速無人物流、農業采摘、安防巡檢、消毒防疫、地理測繪、科研教育等領域。公司創始團隊和研發團隊來自大疆和Mathworks等領軍企業和全國知名科研院校機構,由李澤湘教授孵化,獲得紅杉、五源、祥峰億級投資。